 Le
signal de la porteuse est :
Le
signal de la porteuse est :II
La théorie de la transmission
II.1
Le signal
Avant de commencer à étudier les différentes étapes constituant la transmission de l’information, nous allons exposer quelques principes nécessaires à la compréhension de cette partie. Tout d’abord il faut savoir que, dans le cas des télécommandes, le signal émis est une onde électromagnétique. Que ce soit les télécommandes infrarouge, à fréquence radio, à diode laser et les autres, le signal qui transite entre l’émetteur et le récepteur est constitué d’une variation d’un champ électrique et magnétique qui se propage dans le canal de transmission.
II.1.1 Les sources
Au départ de chaque transmission d’information, il y a un son, une image, de la musique, de la voix, de la vidéo… Il est nécessaire de manipuler cette source pour pouvoir l’utiliser dans le domaine de l’informatique et surtout de l’électronique. Pour cela on utilise ce que l’on appelle des capteurs en général. Par exemple pour traiter une image, comme dans les appareils photos numériques, on utilise un capteur CCD[1]. Pour un son on utilise un microphone. Chacun de ces appareils permet de passer d’un phénomène physique à un signal analogique qui peut en suite être utilisé par un circuit électronique. C’est ce que l’on appel la source d’un signal. Dans le cas des télécommandes, le problème du passage phénomène physique – analogique ne se pose pas. En effet, même si la télécommande doit pouvoir transmettre beaucoup d’information, la source du signal est une oscillation de tension. C’est donc déjà un signal analogique. Ce dernier sera ensuite modifié de façon à pouvoir être transmis dans de bonnes conditions.
II.1.2
Le type
Le type de signal à transmettre dépend de l’utilisation que l’on veut en faire et du type de source que l’on possède au départ. Si on veut envoyer une image ou une vidéo, le type de signal nécessitera une bande passante assez élevée, tandis qu’un son ne prendra qu’une faible bande passante. Le type de signal doit donc être adapté d’une part à la source dont il provient, de façon à ne pas trop détériorer cette source, et d’autre part au canal de transmission dans le but d’éliminer un maximum de perte au cours du transfert de l’information. Pour illustrer ces conséquences émanant du type de signal nous prendrons deux exemples très opposés :
_ Les liaisons transatlantiques : elles ont pour but de transmettre toutes les communications téléphoniques qui proviennent d’une part du continent américain et d’autre part de l’Europe. La bande passante de telles liaisons se doit d’être gigantesque et c’est pour cela que les canaux de transmission, dans ce cas, sont des fibres optiques, utilisant donc la propagation de lumière (quelques dizaines de Mbits/s à des fréquences très élevées atteignant 1014 Hz).
_ Les liaisons télécommandes - récepteur : dans ce cas le signal peut se contenter d’être le plus élémentaire possible puisque ici une seule information est transmise à la fois. Le canal de transmission est alors l’air et ce qui transporte les données sont les ondes hertziennes. La bande passante est cette fois très réduite et les fréquences utilisées sont assez faible (quelques bits/s pour des fréquences allant de 1 KHz à quelques centaines de MHz). Le moyen le plus courant pour générer un signal dans une télécommande est d’utiliser un oscillateur. Celui-ci crée un signal de type sinusoïdal, en variation de tension, à une fréquence donnée qui est la fréquence propre de l’oscillateur. Une fois le composant intégré au circuit, il suffit de transformer ce signal à l’aide d’autres composants tels que d’autres oscillateurs, des transistors, des amplificateurs. On obtient ainsi un signal à fréquence voulue, et surtout à la forme que l’on veut lui appliquer : un train d’impulsions, une suite de trains d’impulsions entrecoupés de signaux d’amplitude nulle, des trains d’impulsions de fréquences différentes…
Le but étant toujours de différencier les signaux d’une même télécommande pour que le récepteur puisse les identifier, ou encore de différencier les signaux de différentes télécommandes : c’est le codage, notion que l’on détaillera un peu plus loin au cours de notre étude.
Il existe donc de multiples types de signaux différents. Cela permet, aux ingénieurs en l’occurrence, de se concentrer sur les autres éléments de la transmission, puisque, quelque soit la source et l’information à transmettre, il y aura toujours un type de signal et un canal de transmission adapté, pour permettre l’envoi des données.
II.2
La modulation
Ce processus est essentiel pour envoyer
des informations d’un émetteur à un récepteur. Il permet de faire transiter
le signal que l’on veut envoyer à travers le canal de transmission ;
dans le cas des télécommandes ce dernier est l’air. La modulation consiste
à transformer le signal informatif (à transmettre) à l’aide d’un autre
signal qui ne sert lui qu’à le transporter. Le signal porteur ne contient,
lui, aucune information ou donnée. Le but de cette étape est de rendre
l’information plus accessible en envoyant le signal plus loin et donc avec
moins de perte d’intensité.
Il existe plusieurs types de modulation :
en amplitude, en phase, en fréquence[2]
(la liste est non exhaustive). Dans notre étude, nous nous limiterons au cas de
la modulation de fréquence, puisqu’elle concerne directement la partie expérimentale
de notre projet (on retrouvera la modulation d’amplitude, assez répandue et
dont son explication nous paraît donc inévitable, en annexe).
Dans le cas général, le signal à
transmettre peut être de la musique ou de la voix (la radio), des images ou des
vidéos (la télévision), mais dans le cas des télécommandes ce signal est
simplement une oscillation de tension ou de courant. Elle est plus ou moins définie,
précise, suivant les besoins du constructeur ou de l’expérimentateur ou des
difficultés rencontré lors de la transmission. Pour comprendre ce qu’est la
modulation nous partirons d’un signal à transmettre (signal modulant) du type :
s(t)
= a cos(ωt)
_
a est l amplitude du signal
_
ω est sa pulsation : ω = 2πf
_
f est sa fréquence
Il
n’est qu’un simple signal sinusoïdal mais nous savons qu’un signal
quelconque est une somme de signaux sinusoïdaux (d’après les théories de
Fourier). Ce signal sera modulé par une porteuse dont la fréquence est
beaucoup plus importante que celle du signal.
Le
signal de la porteuse est :
S(t)
= A cos(Ωt)
_
A est l amplitude du signal
_
Ω est sa pulsation : Ω = 2πF
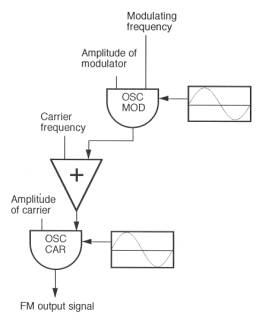
Les signaux sont alors
envoyés à des composants électroniques qui sont chargés de les
moduler en fréquence. On peut voir un exemple de fonctionnement
sur le schéma ci-contre.
_ F est sa fréquence
fréquence
Mathématiquement
on multiplie les deux signaux entre eux.
On
obtient ainsi un signal transmis de la forme :
St(t)
= cos(Ω (1 + m cos(ω t) t )
_
m est le taux de modulation en fréquence
_ m = (fmax -fmin)/f
_
fmax et fmin sont les fréquences maximale et minimale du
signal transmis.
Fig 5 :
exemples de signaux modulés.
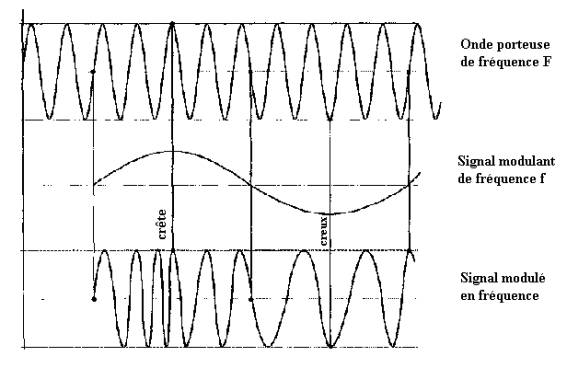
Le
signal dépend alors de la fréquence du signal modulant et de la fréquence de
la porteuse ; son amplitude est quand à elle constante. Nous verrons par
la suite que ce dernier fait parait essentiel dans la diminution des risques de
dégradation du signal. Le signal obtenu est en haute fréquence ce qui va
permettre une transmission plus aisée par les ondes électromagnétiques.
II.3 Les problèmes
techniques : déformations du
signal
Le
signal transmis peut être modifié et subir des déformations[3]. Les composantes de fréquences
élevées peuvent par exemple disparaître ou le signal peut être réfléchi
par un obstacle ce qui provoquera
un écho.
Fig 6 :
exemple de déformations
Il
n’est pas forcément évident de résoudre ces distorsions, cependant on peut
améliorer la compréhension du signal en considérant certaines caractéristiques
de ce dernier. Celui ci est souvent codé en binaire, il suffit donc de le
redresser en sortie.
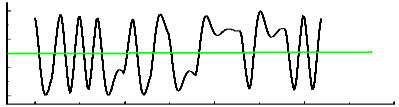
Fig 7 :
égalisation d’un signal.
En
considérant que le signal est à 1 au-dessus de la valeur marquée en vert et
nul en dessous, on retrouve quasiment le signal d’origine. Il suffit alors de
prendre en compte la fréquence du signal émis pour que le signal obtenu soit
vraiment correct. On parle d’égalisation du signal.
II.3.2 L’affaiblissement
L'affaiblissement
d'un signal est du à des caractéristiques du support (résistance, dispersion
de l'onde...). Cet affaiblissement est compensé par des amplificateurs qui sont
à la fois utilisés en émission et en réception. Dans le cas que nous allons
étudier, les infrarouges, la diode émet un faisceau divergent dont
l’intensité diminue en 1/r2. Ainsi, dans les conditions normales
d’utilisation de la télécommande, on peut espérer commander à quelques mètres.
Et cela à condition que le signal ait été modulé à une certaine fréquence
afin de ne pas être perturbé par les éclairages fluorescents (100Hz) ou les
écrans vidéo (15 kHz). Un bon moyen d’augmenter la portée de manière
significative est de placer une lentille convergente après la diode afin de
diriger le faisceau. Il faut cependant garder une certaine dispersion, sans quoi
la télécommande serait trop difficile à diriger. En équipant à la fois le récepteur
et l’émetteur de lentille, on peut atteindre des portées pouvant aller
jusqu’à 200 m.
II.3.3 Le bruit
Le
bruit est un signal parasite de l’environnement. Suivant son intensité il
peut conduire à des erreurs d’interprétation du signal comme on peut le
voir sur la figure 8. L’existence du bruit provoque deux erreurs d’interprétation
sur le signal d’arrivée.
Fig 8
: exemple d’erreur apporté par le bruit sur un
signal

Les
problèmes dus au bruit disparaissent avec la modulation. En effet le bruit
provenant de l’environnement, il contient des fréquences désordonnées. En
modulant le signal à une fréquence bien précise, on peut éliminer le bruit
au niveau du récepteur avec un filtre passe bande, voir passe haut :
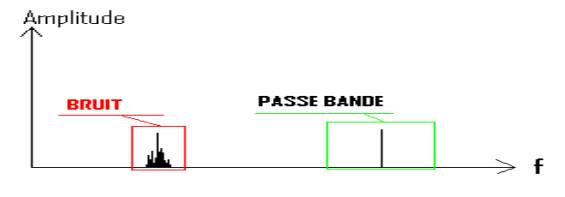
On ne sélectionne
alors que la partie correspondant au signal (en vert).
II.4
La démodulation
Dernière étape fondamentale de ce parcourt pour le signal, la démodulation est très délicate. C’est lors de ce passage que le signal doit être reconstitué. Il s’agit donc de rendre le signal à l’utilisateur aussi fidèle qu’au départ, mais la tâche s’avère difficile puisque le signal reçu par le récepteur est dégradé, comme nous avons pu le constater précédemment. Les composants électroniques qui composent le récepteur doivent donc être choisi en conséquence de façon à obtenir le meilleur résultat possible. Mathématiquement il suffit de diviser par la sinusoïde correspondant à la porteuse : on retrouve alors exactement le signal d’émission. Cependant il n’est pas possible de réaliser ceci électroniquement, il faut donc voir les choses autrement. En fait l’information correspond aux fréquences les moins élevées, il suffit donc de filtrer ces composantes pour retrouver le signal. Pour cela on utilise en électronique un filtre passe-bas, car la porteuse correspond aux hautes fréquences.
On arrive, finalement, à obtenir à la réception, un signal quasi-identique à celui de départ. Il ne reste plus qu’à utiliser une porte logique pour que le récepteur accepte ou non ce signal. Si il n’est pas suffisamment correct le récepteur n’effectue pas la tâche, si la porte logique fonctionne le signal est transmis et l’opération demandée est exécutée.
Le signal a maintenant été transmis avec succès. Les télécommandes, comme nous l’évoquions précédemment, utilisent toutes, sans exception, le type de transmission que nous avons étudié. Mais, de nos jours, il ne suffit pas de réaliser un circuit électronique qui fonctionne correctement, de faire transmettre un message ou une information d’un endroit à un autre sans qu’il se détériore, il faut aussi protéger ce dernier. Il faut pouvoir envoyer plusieurs signaux au même récepteur, utiliser plusieurs télécommandes dans une même pièce, sans que tous les signaux émis ne se mélangent, ne se perdent ou ne se confondent. Il faut aussi, dans le cas de messages ou de transmission de données, pouvoir les rendre « illisibles[4] » : c’est dans tous ces cas que nous faisons appel au codage. Et c’est précisément ce que nous allons étudier maintenant.
[1] Charge Couple Device traduit généralement en français par Dispositif à Transfert de Charge.
[2] Voir les sites Internet se rapportant à ce sujet.
[3] cf. le site Internet décrivant les problèmes techniques.
[4]
Par les pirates informatiques par exemple.